The center of gravity of a rigid body and how to find its position. The center of gravity of a rigid body and methods for finding its position Determining the coordinates of the center of gravity of a rigid body

 Live Journal
Live Journal Facebook
Facebook Twitter
TwitterIf a solid body is near the surface of the Earth, then gravity is applied to each material point of this body. In this case, the dimensions of the body in comparison with the size of the Earth are so small that the forces of gravity acting on all particles of the body can be considered parallel to each other
Center (point FROM) of the system of parallel gravity forces of all points of the body is called center of gravity of a solid , and the sum of the forces of gravity of all its material points is called by gravity acting on him
The coordinates of the center of gravity of a rigid body are determined by the formulas:
where are the coordinates of the points of application of gravity forces acting on k-th material point.
For a homogeneous body:
where V is the volume of the whole body;
V k - volume kth particle.
For a uniform thin plate:
![]()
where S is the area of \u200b\u200bthe plate;
S k -area k-th part of the plate.
For the line:
where L - the length of the entire line;
L k - length kpart of the line.
Methods for determining the coordinates of the centers of gravity of bodies:
Theoretical
Symmetry.If a homogeneous body has a plane, axis, or center of symmetry, then its center of gravity lies, respectively, either in the plane of symmetry, or on the axis, or in the center of symmetry.
Splitting.If the body can be divided into a finite number of such parts, for each of which the position of the center of gravity is known, then the coordinates of the center of gravity of the whole body can be directly calculated using the above formulas.
Addition.This method is a special case of the splitting method. It applies to bodies with cutouts if the centers of gravity of the body without the cutout and the cutout part are known. They are included in the calculations with a "-" sign.
Integration. When the body cannot be divided into its component parts, the centers of gravity of which are known, the integration method is used, which is universal.
Experimental
Hanging method. The body is suspended at two or three points, drawing verticals from them. The point of their intersection is the center of mass.
Weighing method... The body is placed in different parts on the balance, thereby determining the support reactions. Equilibrium equations are compiled, from which the coordinates of the center of gravity are determined.
 Using theoretical methods, formulas were derived to determine center of gravity coordinates
the most common homogeneous bodies:
Using theoretical methods, formulas were derived to determine center of gravity coordinates
the most common homogeneous bodies:
Arc of a circle
The center of gravity a geometric point, invariably associated with a rigid body, through which the resultant of all gravity forces acting on the particles of this body passes through any position of the latter in space; it may not coincide with any of the points of the given body (for example, at the ring). If a free body is suspended on threads that are sequentially attached to different points of the body, then the directions of these threads will intersect in the central point of the body. The position of the central point of a solid in a uniform gravity field coincides with the position of its center of mass (see Center of mass). Breaking the body apart with weights p k, for which coordinates x k, y k, z k their CTs are known, you can find the coordinates of the CTs of the whole body by the formulas:
Great Soviet Encyclopedia. - M .: Soviet encyclopedia. 1969-1978 .
Synonyms:See what "Center of gravity" is in other dictionaries:
The center of mass (center of inertia, barycenter) in mechanics is a geometric point that characterizes the movement of a body or a system of particles as a whole. Contents 1 Definition 2 Centers of mass of homogeneous figures 3 In mechanics ... Wikipedia
A point invariably associated with a rigid body through which the resultant of gravity forces acting on the particles of this body passes at any position of the body in space. A homogeneous body having a center of symmetry (circle, ball, cube, etc.), ... ... encyclopedic Dictionary
Geom. a point that is invariably associated with a solid body, the resultant force of all gravity forces acting on the particles of the body at any position in space passes through the path; it may not coincide with any of the points of the given body (for example, at ... ... Physical encyclopedia
A point invariably associated with a rigid body through which the resultant of gravity forces acting on the particles of this body passes at any position of the body in space. For a homogeneous body with a center of symmetry (circle, ball, cube, etc.), ... ... Big Encyclopedic Dictionary
The center of gravity - CENTER OF GRAVITY, the point through which the resultant of gravity forces acting on the particles of a solid body passes through at any position of the body in space. A homogeneous body with a center of symmetry (circle, ball, cube, etc.) has a center of gravity ... Illustrated Encyclopedic Dictionary
CENTER OF GRAVITY, the point at which the body's weight is concentrated and around which its weight is distributed and balanced. A freely falling object rotates around its center of gravity, in turn rotating along a trajectory that would be described by a point ... ... Scientific and technical encyclopedic dictionary
the center of gravity - solid body; center of gravity Center of parallel gravity forces acting on all body particles ... Polytechnic Terminological Explanatory Dictionary
Centroid Dictionary of Russian synonyms. center of gravity n., number of synonyms: 12 main (31) spirit ... Synonym dictionary
THE CENTER OF GRAVITY - the human body does not have a permanent anat. location inside the body, but moves depending on changes in posture; his excursions relative to the spine can reach 20-25 cm. Experimental determination of the position of the central body of the whole body with ... ... Big medical encyclopedia
The point of application of the resultant force of gravity (weights) of all separate parts (parts) that make up a given body. If the body is symmetric with respect to a plane, straight line or point, then in the first case the central point lies in the plane of symmetry, in the second on ... ... Technical Railway Dictionary
the center of gravity - The geometric point of a solid, through which the resultant of all gravity forces acting on the particles of this body passes at any position in space [Terminological dictionary for construction in 12 languages \u200b\u200b(VNIIIS Gosstroy ... ... Technical translator's guide
Books
- Center of gravity, AV Polyarinov. Alexey Polyarinov's novel resembles a complex system of lakes. It features cyberpunk, the majestic designs of David Mitchell, Borges, and David Foster Wallace ... But his heroes are young journalist ...
Center of gravity a rigid body is a geometric point rigidly connected to this body, and which is the center of parallel gravity forces applied to individual elementary particles of the body (Figure 1.6).
The radius vector of this point

Figure 1.6
For a homogeneous body, the position of the center of gravity of the body does not depend on the material, but is determined by the geometric shape of the body.
If the specific gravity of a homogeneous body γ , the weight of an elementary particle of the body
P k \u003d γΔV k (P = γV ) substitute in the formula to determine r C , we have
Whence, projecting on the axis and passing to the limit, we obtain the coordinates of the center of gravity of a homogeneous volume

Similarly, for the coordinates of the center of gravity of a homogeneous surface with area S (Figure 1.7, a)


Figure 1.7
For the coordinates of the center of gravity of a homogeneous line with length L (Figure 1.7, b)

Methods for determining the coordinates of the center of gravity
Based on the previously obtained general formulas, it is possible to indicate methods for determining the coordinates of the centers of gravity of solids:
1 Analytical (by integration).
2 Symmetry method... If the body has a plane, axis or center of symmetry, then its center of gravity lies, respectively, in the plane of symmetry, axis of symmetry, or in the center of symmetry.
3 Experimental (body suspension method).
4 Splitting... The body is divided into a finite number of parts, for each of which the position of the center of gravity C and area S are known. For example, the projection of the body onto the plane xOy (Figure 1.8) can be represented in the form of two flat figures with areas S 1 and S 2 (S \u003d S 1 + S 2 ). The centers of gravity of these figures are at points C 1 (x 1 , y 1 ) and C 2 (x 2 , y 2 ) ... Then the coordinates of the center of gravity of the body are


Figure 1.8
5Addition (method of negative areas or volumes). A special case of the partitioning method. It applies to bodies with cutouts if the centers of gravity of the body without the cutout and the cutout part are known. For example, you need to find the coordinates of the center of gravity of a flat figure (Figure 1.9):


Figure 1.9
The centers of gravity of the simplest figures
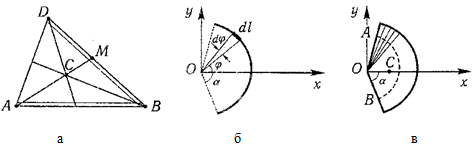
Figure 1.10
1 Triangle
The center of gravity of the area of \u200b\u200bthe triangle coincides with the point of intersection of its medians (Figure 1.10, a).
DM \u003d MB , CM \u003d (1/3)AM .
2 Arc of a circle
The arc has an axis of symmetry (Figure 1.10, b). The center of gravity lies on this axis, i.e. y C = 0 .

dl - arc element, dl = Rdφ , R - radius of the circle, x \u003d Rcosφ , L \u003d 2αR ,
Consequently:
x C \u003d R (sinα / α) .
3 Circular sector
Radius sector R with a central corner 2 α has an axis of symmetry Ox , on which the center of gravity is located (Figure 1.10, c).
We divide the sector into elementary sectors that can be considered triangles. The centers of gravity of the elementary sectors are located on an arc of a circle of radius (2/3) R .
The center of gravity of the sector coincides with the center of gravity of the arc AB :

14. Methods for specifying the movement of a point.
In the vector method of specifying the motion, the position of the point is determined by the radius vector drawn from a fixed point in the selected frame of reference.
With the coordinate method of specifying movement, the coordinates of the point are specified as a function of time:

These are parametric equations of the trajectory of a moving point, in which time plays the role of a parameter t ... To write down its equation in explicit form, it is necessary to exclude from them t .
With the natural method of specifying the movement, the trajectory of the point, the origin on the trajectory with the indication of the positive direction of the reference, the law of changing the arc coordinate are set: s \u003d s (t) ... This method is convenient to use if the trajectory of the point is known in advance.
15. 1.2 Point speed
Consider moving a point in a short period of time Δt :
![]()
average speed of a point over a period of time Dt ... Point speed at a given time


Point speed Is the kinematic measure of its motion, equal to the time derivative of the radius vector of this point in the considered frame of reference. The velocity vector is directed tangentially to the trajectory of the point in the direction of motion.
View:this article has been read 11269 times
Pdf Select language ... Russian Ukrainian English
Short review
The entire material is downloaded above, having previously selected the language
Overview
Lever arm is a rigid body with a fixed axis of rotation and under the action of forces lying in a plane perpendicular to this axis.
If the lever is at rest, then the algebraic sum of the moments of all the forces applied to the lever relative to the pivot point is zero
Arbitrary flat system of forces is a system of forces, the lines of action of which are independently located in the plane.
The Poinsot method in the center of reduction O will obtain a system of forces and a system of pairs, the moments of each of which are equal to the moments of the corresponding force relative to the center of reduction.
The main vector of the system a vector is called, which is equal to the geometric sum of all the forces of the system.
The main point of the system relative to the center O in the plane is called the algebraic sum of the moments of forces of the system relative to the center of reduction O.
The main vector does not depend on the choice of the center of reduction O. The main moment of forces depends on the center of reduction.
The main statics theorem on reducing a system of forces to a given center : Any flat arbitrary system of forces acting on an absolutely rigid body, when reduced to an arbitrarily chosen center O, can be replaced by one force equal to the main vector of the system and applied at the center of reduction O, and one pair with a moment equal to the main moment of the system relative to the center of O.
Cases of reduction of a plane system of forces to a simpler form are considered
Equilibrium conditions for an arbitrary plane system of forces.
1. Geometric Equilibrium Conditions : for equilibrium of a plane arbitrary system of forces, it is necessary and sufficient that the main vector and the main moment of the system be equal to zero
2. Analytical Equilibrium Conditions .
Basic form of equilibrium conditions: For equilibrium of an arbitrary plane system of forces, it is necessary and sufficient that the sum of the projections of all forces on the coordinate axes and the sum of their moments relative to any center that lies in the plane of action of the forces are equal to zero.
The second form of equilibrium conditions: For the equilibrium of an arbitrary plane system of forces, it is necessary and sufficient that the sum of the moments of all forces relative to any two centers A and B and the sum of their projections onto an axis not perpendicular to the line AB are equal to zero.
The third form of equilibrium conditions (equation of three moments): For the equilibrium of a flat arbitrary system of forces, it is necessary and sufficient that the sums of the moments of all forces relative to any three centers A, B and C, which do not lie on one straight line, equal zero.
Center of Parallel Forces
A system of parallel forces directed in one direction cannot be balanced or reduced to a pair of forces, it always has a resultant.
The line of action of the resultant is parallel to the forces. The position of the point of its application depends on the values \u200b\u200band position of the points of application of the forces of the system.
Center of Parallel Forces
- point C is the point of application of the resultant system of parallel forces.
The position of the center of parallel forces - point C, is determined by the coordinates of this point
The center of gravity of a rigid body and its coordinates
Body center of gravity - a geometric point invariably associated with this body, at which the resultant of the gravity forces of individual particles of the body is applied, i.e. body weight in space.
The coordinates of the center of gravity are determined similarly to the coordinates of the center of parallel forces С (), composed by the gravity forces of the body particles.
The position of the center of gravity of a homogeneous body depends only on its geometric shape and dimensions, and does not depend on the properties of the material from which the body is made.
The sum of the products of the elementary areas that make up a plane figure by the algebraic values \u200b\u200bof their distances to a certain axis is called the static moment of the area of \u200b\u200bthe plane figure.
Static moment
the area of \u200b\u200ba flat figure is equal to the product of the area of \u200b\u200bthe figure by the algebraic distance from the center of gravity to this axis. The unit of measurement for static moment [cm3].
the static moment of the area of \u200b\u200ba plane figure with respect to the axis that passes through the center of gravity of the figure is equal to zero.
The weight of the body is the resultant of the gravity forces of the individual particles of the body.
Methods for determining the position of the center of gravity .
- Symmetry method : If a homogeneous body has a plane, an axis or a center of symmetry, then the center of gravity lies, respectively, either in the plane of symmetry, or on the axis of symmetry, or in the center of symmetry. The center of gravity of a line of length is in the middle. The center of gravity of a circle (or circle) of radius is at its center, i.e. at the point of intersection of the diameters. The center of gravity of a parallelogram, rhombus, or parallelepiped is at the intersection of the diagonals. The center of gravity of a regular polygon is at the center of an inscribed or circumscribed circle.
- Breakdown method : If the body can be divided into a finite number of elements (volumes, planes, lines), for each of which the position of the center of gravity is known, then the coordinates of the center of gravity of the whole body can be determined knowing the values \u200b\u200bfor the elements directly by the formulas
- Complement method (negative planes): If the body has cut out elements, then when splitting into elements, the cut part (area, volume) is subtracted from the total, i.e. cut elements are given negative values \u200b\u200bfor area or volume
Format: pdf
Size: 700 KV
Language: Russian, Ukrainian
An example of calculating a spur gear
An example of calculating a spur gear. The choice of material, calculation of permissible stresses, calculation of contact and bending strength were performed.
An example of solving the problem of bending a beam
In the example, diagrams of shear forces and bending moments are constructed, a dangerous section is found and an I-beam is selected. The problem analyzes the construction of diagrams using differential dependencies, a comparative analysis of various cross-sections of the beam is carried out.
An example of solving the problem of shaft torsion
The task is to check the strength of a steel shaft for a given diameter, material and allowable stresses. During the solution, diagrams of torques, shear stresses and torsion angles are plotted. The dead weight of the shaft is not taken into account.
An example of solving the problem of tension-compression of a bar
The task is to check the strength of a steel bar at a given allowable stress. During the solution, diagrams of longitudinal forces, normal stresses and displacements are plotted. The self-weight of the bar is not taken into account
Application of the kinetic energy conservation theorem
An example of solving the problem on the application of the theorem on the conservation of kinetic energy of a mechanical system
Determination of the speed and acceleration of a point according to the given equations of motion
An example of solving a problem to determine the speed and acceleration of a point by the given equations of motion
Determination of the speeds and accelerations of points of a rigid body during plane-parallel motion
An example of solving the problem of determining the velocities and accelerations of points of a rigid body with plane-parallel motion
The first discovery of Archimedes in mechanics was the introduction of the concept of the center of gravity, i.e. proof that in any body there is a single point at which its weight can be concentrated without disturbing the equilibrium state.
The center of gravity of a body is a point of a rigid body through which the resultant of all gravity forces acting on the elementary masses of this body passes through at any position in space.
Center of gravity mechanical system is called a point relative to which the total moment of gravity forces acting on all bodies of the system is equal to zero.
Simply put, the center of gravity Is the point to which gravity is applied regardless of the position of the body itself. If the body is homogeneous, the center of gravity usually located at the geometric center of the body. Thus, the center of gravity in a uniform cube or uniform ball coincides with the geometric center of these bodies.
If the dimensions of the body are small in comparison with the radius of the Earth, then we can assume that the gravity forces of all particles of the body form a system of parallel forces. Their resultant is called by gravity, and the center of these parallel forces is body center of gravity.The coordinates of the center of gravity of the body can be determined by the formulas (Fig. 7.1):
 ,
,  ,
,  ,
,
where  - body weight x i, y i, z i - coordinates of an elementary particle, weight P i;.
- body weight x i, y i, z i - coordinates of an elementary particle, weight P i;.
The formulas for determining the coordinates of the center of gravity of a body are accurate, strictly speaking, only when the body is divided into an infinite number of infinitely small elementary particles with weight P i... If the number of particles into which the body is mentally divided is finite, then in the general case these formulas will be approximate, since the coordinates x i, y i, z i in this case, they can only be determined with an accuracy of particle sizes. The smaller these particles, the less will be the error that we will make when calculating the coordinates of the center of gravity. Exact expressions can only be reached as a result of the passage to the limit, when the size of each particle tends to zero, and their number increases indefinitely. As you know, such a limit is called a definite integral. Therefore, the actual determination of the coordinates of the centers of gravity of bodies in the general case requires replacing the sums with the corresponding integrals and applying the methods of integral calculus.
If the mass inside a rigid body or mechanical system is distributed non-uniformly, then the center of gravity shifts to the part where it is heavier.
The body's center of gravity may not always even be inside the body itself. So, for example, the boomerang's center of gravity is somewhere in the middle between the boomerang's extremities, but outside the boomerang's body itself.
For securing loads, the position of the center of gravity is very important. It is at this point that gravity and inertial forces are applied, acting on the load in the process of movement. The higher the center of gravity of a body or mechanical system, the more prone it is to overturn.
The center of gravity of the body coincides with the center of mass.
- Dried fruit sweets "Energy koloboks"
- Raspberry grated with sugar: tasty and healthy
- Alexey Pleshcheev: biography
- How to preserve apple juice
- Cabbage salad with carrots like in a dining room - the best recipes from childhood
- An even complexion without foundation!
- Pumpkin juice with carrots for the winter